Японцы создали робопалец, позволяющий потрогать микронасекомое
Исследователи из Университета Рицумейкан в Японии разработали мягкий микророботизированный палец, который может обеспечить более прямое взаимодействие с микромиром. Исследование, проведенное под руководством профессора Сатоси Кониши, было опубликовано в Scientific Reports.
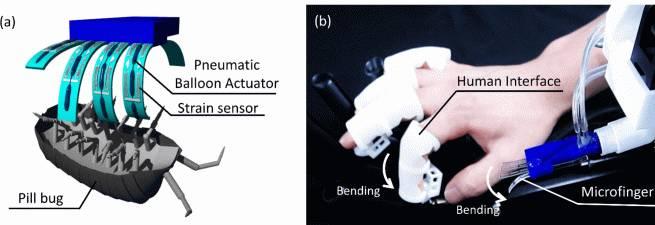
Как объяснил Кониши, за сверхосторожные прикосновения отвечает жидкометаллический гибкий тензодатчик, а пневматический баллонный привод работает подобно искусственной мышце, позволяя управлять датчиком и перемещать его, как палец. Созданная на его основе роботизированная перчатка позволяет управлять целым набором микропальцев.
В процессе эксперимента подопытного жука-таблеточника зафиксировали с помощью всасывающего устройства, при этом микропалец использовался для прикосновения и измерения силы реакции конечностей насекомого, которая составила 10 миллиньютонов.
По мнению разработчиков, в будущем такую роботизированную перчатку можно объединить с технологиями дополненной реальности для взаимодействия человека с окружающей средой на микроуровне.
Сахифани кўриш статистикаси:
- бу ой (Феврал 2026) - 1;
- ўтган ой (Январ 2026) - 9;
- оxирги 3 ой (Ноябр 2025 - Январ 2026) - 14;
- оxирги йил (Феврал 2025 - Январ 2026) - 19;
Мақолалар ва шарҳлар Барча мақолалар




Компаниялар: 2615
Мақолалар: 15130